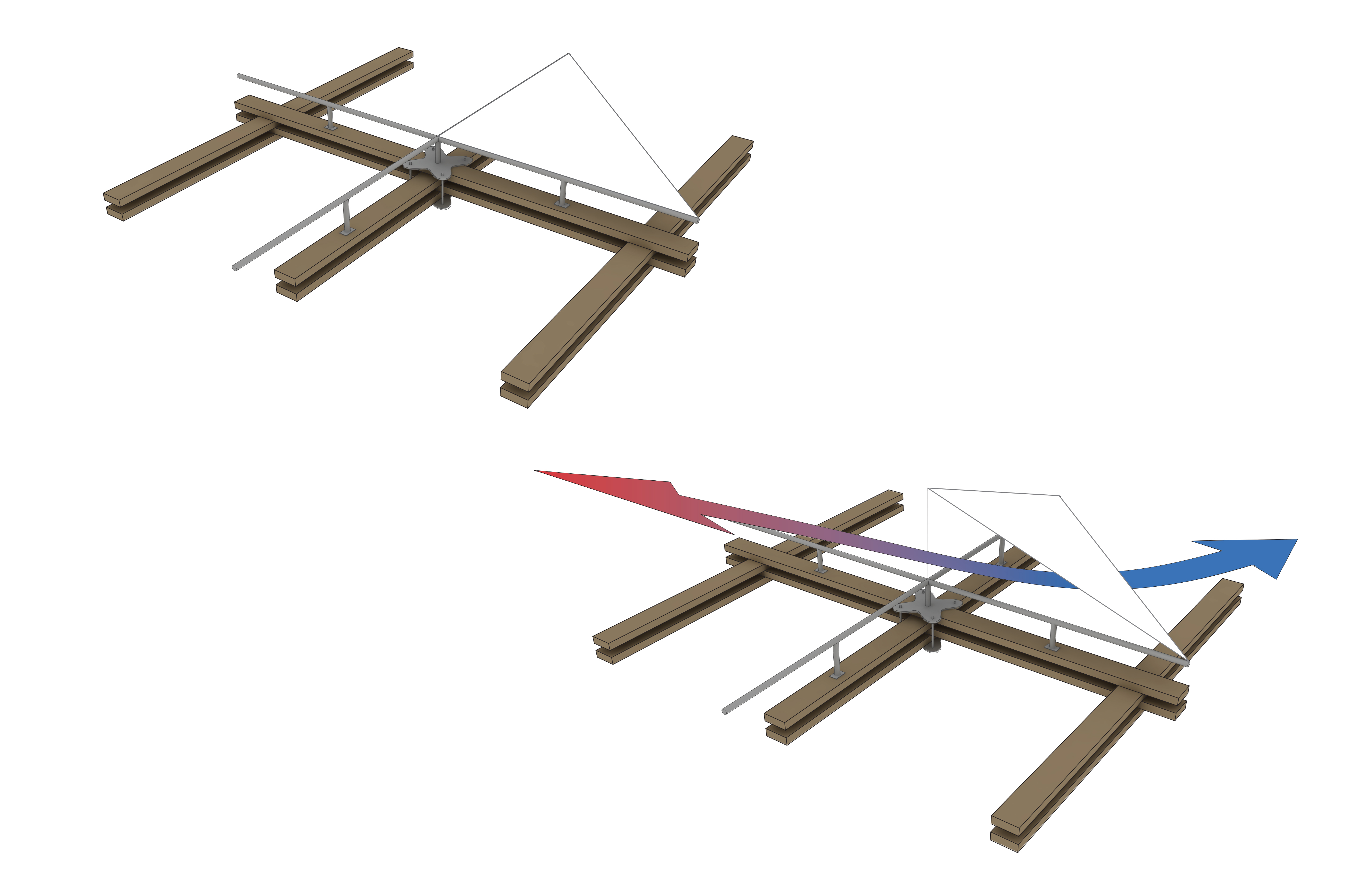
Developed for an Aquatic Center, Gridshell Gills would function as an operable system integrated with a gridshell membrane . Similar to how gills serve a fish, this passive system would allow the transfer of air to condition the spaces inside and potentially cut down on energy costs for a large facility. The design develops as a secondary system for the membrane to attach to. Within that system, a collection of linear actuators would push on a panels corner allowing it to raise and lower. The initial idea matured itself from a shading device assimilated on a gridshell pavilion.

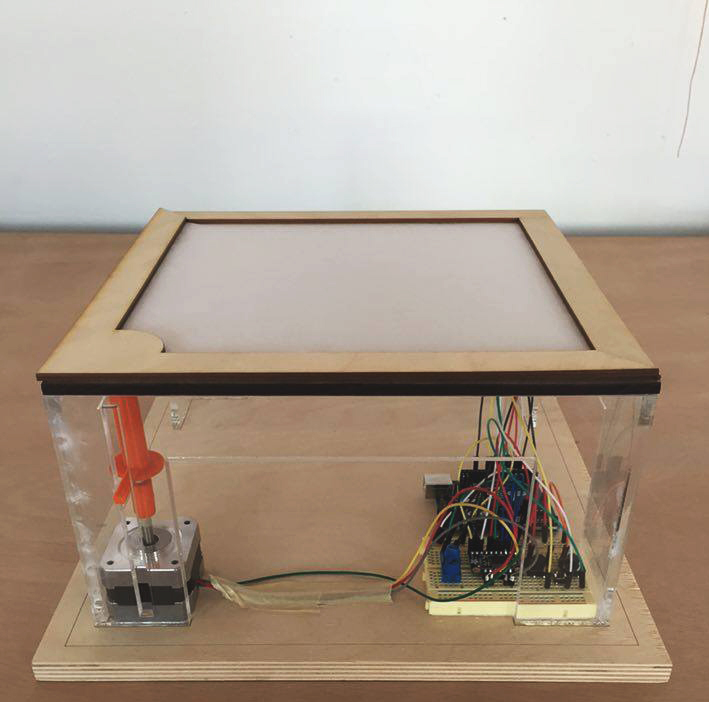
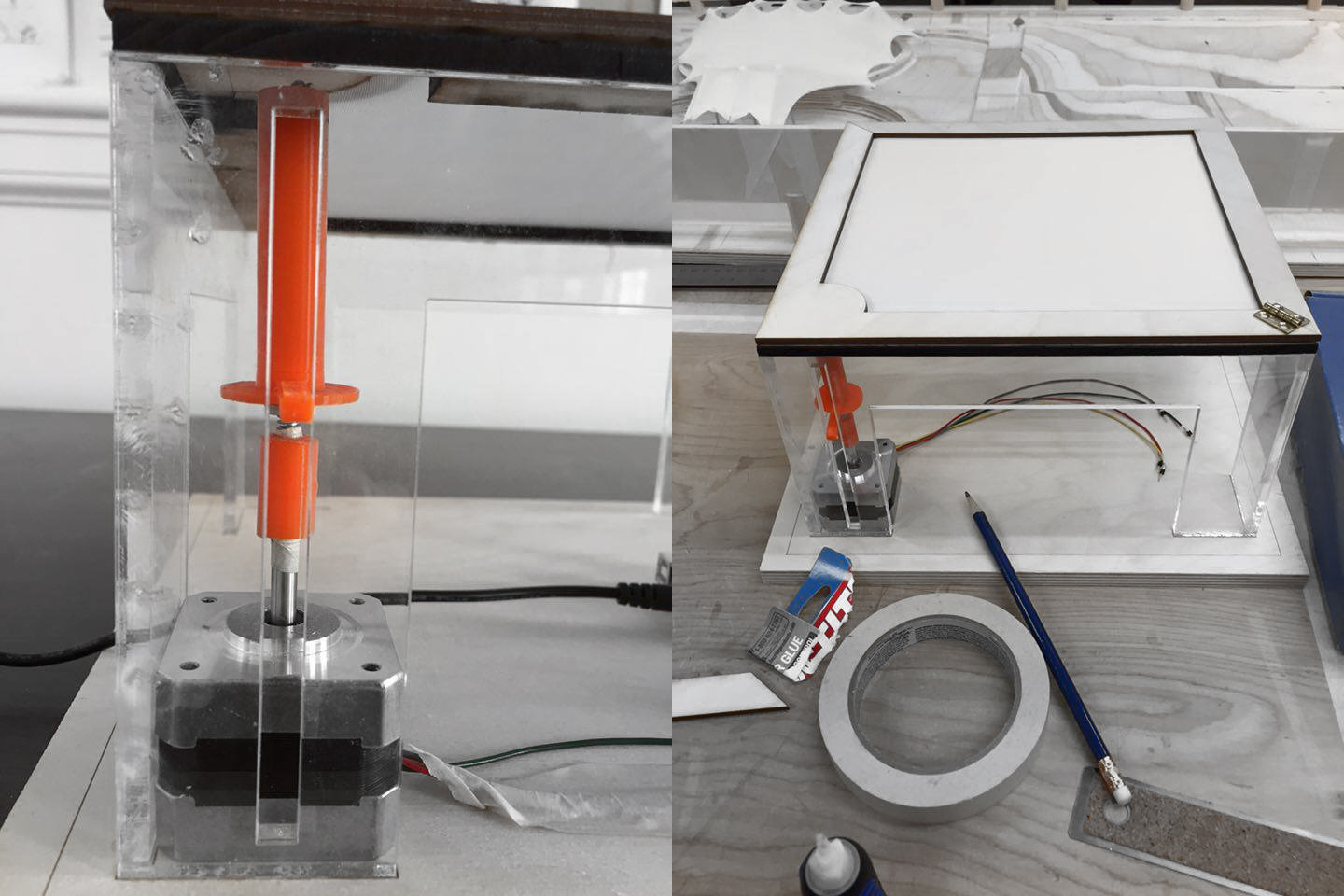
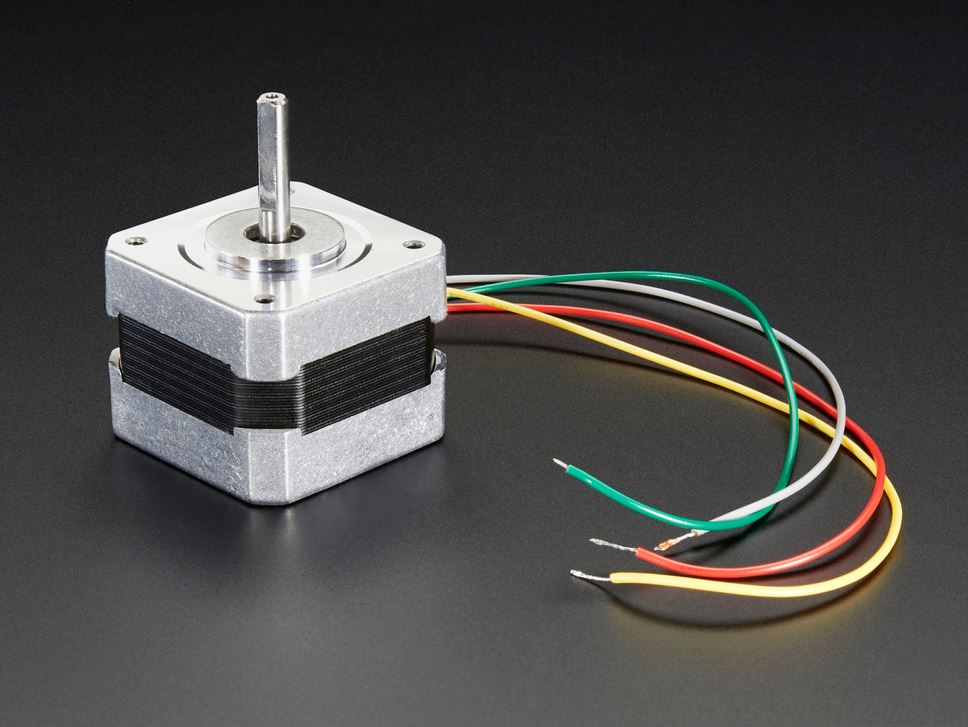
The prototype for this system was constructed from a stepper motor and custom 3D printed parts that transformed its organization into a linear actuator. The Prototype allows the custom 3D printed pieces to rotate on threaded rod, opening and closing the panel.
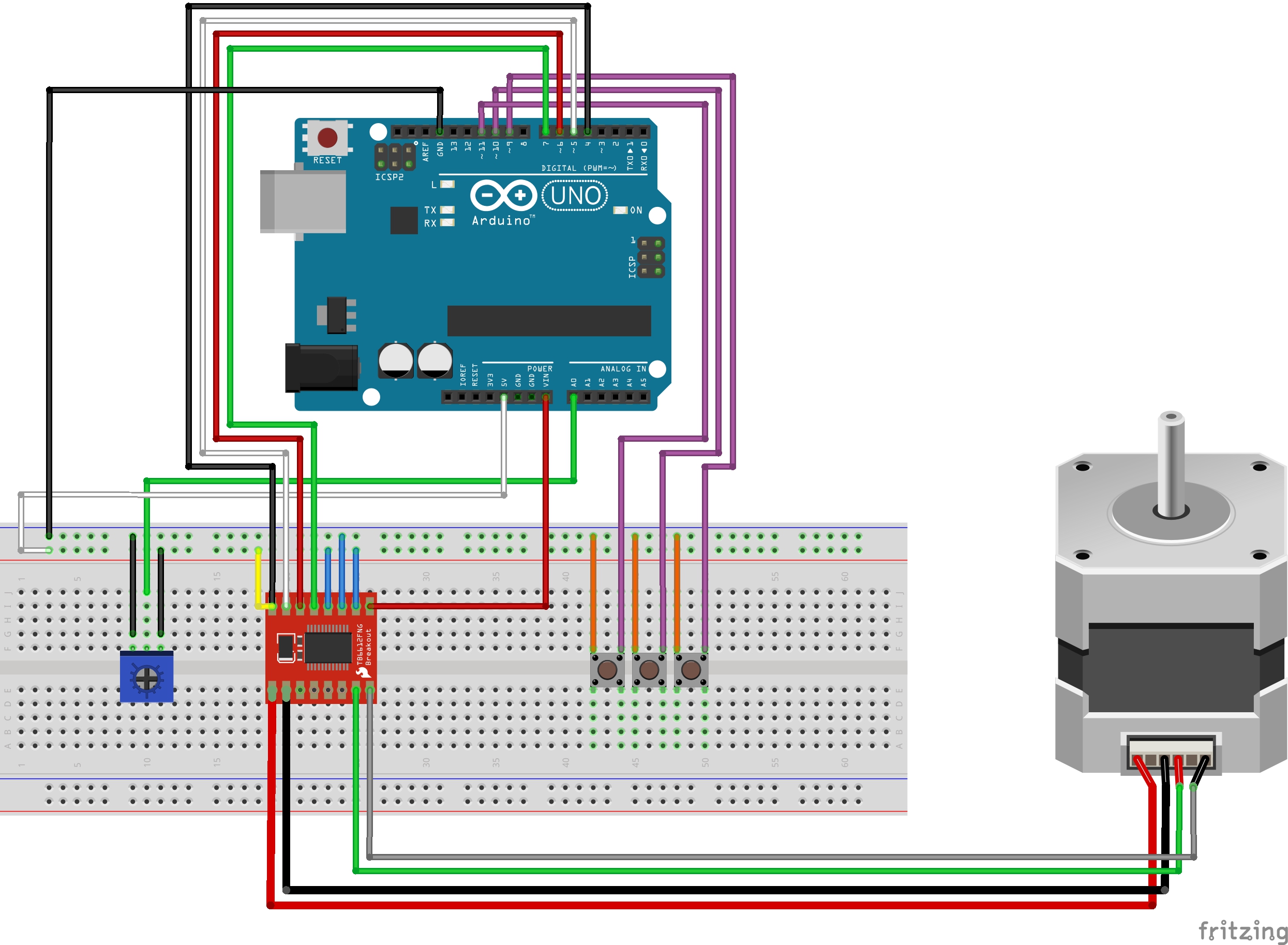
A Potentiometer has also been added to the breadboard to slow or speed up the stepper motor, which can open and close the panel at a desired speed. Three push buttons have also been added to stop and change the direction of the stepper motor. The left button turns the motor clockwise. The Middle stops the motor, and the right button turns the motor counterclockwise.
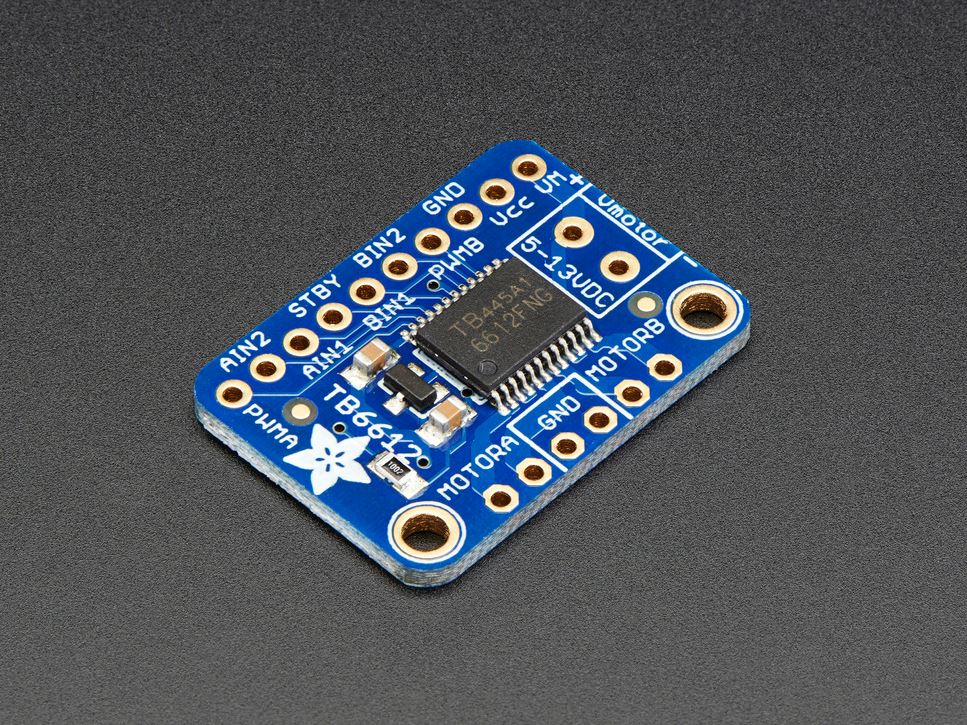
The components below are linked directly to Adafruit. By directly clicking on the image it will navigate to the proper web pages for purchase.
The Fritzing Diagram was constructed to help understand the schematics of the system and how it was constructed.
Code:
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 4, 5, 6, 7);
// Define our three input button pins
#define LEFT_PIN 11
#define STOP_PIN 10
#define RIGHT_PIN 9
int stepCount = 0; // number of steps the motor has taken
void setup() {
// Set up the three button inputs, with pullups
pinMode(LEFT_PIN, INPUT_PULLUP);
pinMode(STOP_PIN, INPUT_PULLUP);
pinMode(RIGHT_PIN, INPUT_PULLUP);
}
void loop() {
// read the sensor value:
int sensorReading = analogRead(A0);
// map it to a range from 0 to 100:
int motorSpeed = map(sensorReading, 0, 1023, 0, 100);
// set the motor speed:
if (motorSpeed > 0) {
myStepper.setSpeed(motorSpeed);
// step 1/100 of a revolution:
myStepper.step(stepsPerRevolution / 100);
}
{
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(0);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(10000);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(0);
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(10000);
}
}
FAILURES
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 4, 5, 6, 7);
// Define our three input button pins
#define LEFT_PIN 11
#define STOP_PIN 10
#define RIGHT_PIN 9
// Define our analog pot input pin
#define SPEED_PIN 0
// Define our maximum and minimum speed in steps per second (scale pot to these)
#define MAX_SPEED 200
#define MIN_SPEED 0
int stepCount = 0; // number of steps the motor has taken
void setup() {
// Set up the three button inputs, with pullups
pinMode(LEFT_PIN, INPUT_PULLUP);
pinMode(STOP_PIN, INPUT_PULLUP);
pinMode(RIGHT_PIN, INPUT_PULLUP);
}
void loop() {
// read the sensor value:
int sensorReading = analogRead(A0);
// map it to a range from 0 to 100:
int motorSpeed = map(sensorReading, 0, 1023, 0, 100);
// set the motor speed:
if (motorSpeed > 0) {
myStepper.setSpeed(motorSpeed);
// step 1/100 of a revolution:
myStepper.step(stepsPerRevolution / 100);
}
{
static float current_speed = 0.0; // Holds current motor speed in steps/second
static int analog_read_counter = 1000; // Counts down to 0 to fire analog read
static char sign = 0; // Holds -1, 1 or 0 to turn the motor on/off and control direction
static int analog_value = 0; // Holds raw analog value.
// If a switch is pushed down (low), set the sign value appropriately
if (digitalRead(LEFT_PIN) == 0) {
sign = 1;
}
else if (digitalRead(RIGHT_PIN) == 0) {
sign = -1;
}
else if (digitalRead(STOP_PIN) == 0) {
sign = 0;
}
/*
Stepper Motor Control – one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 – 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(500);
}
}