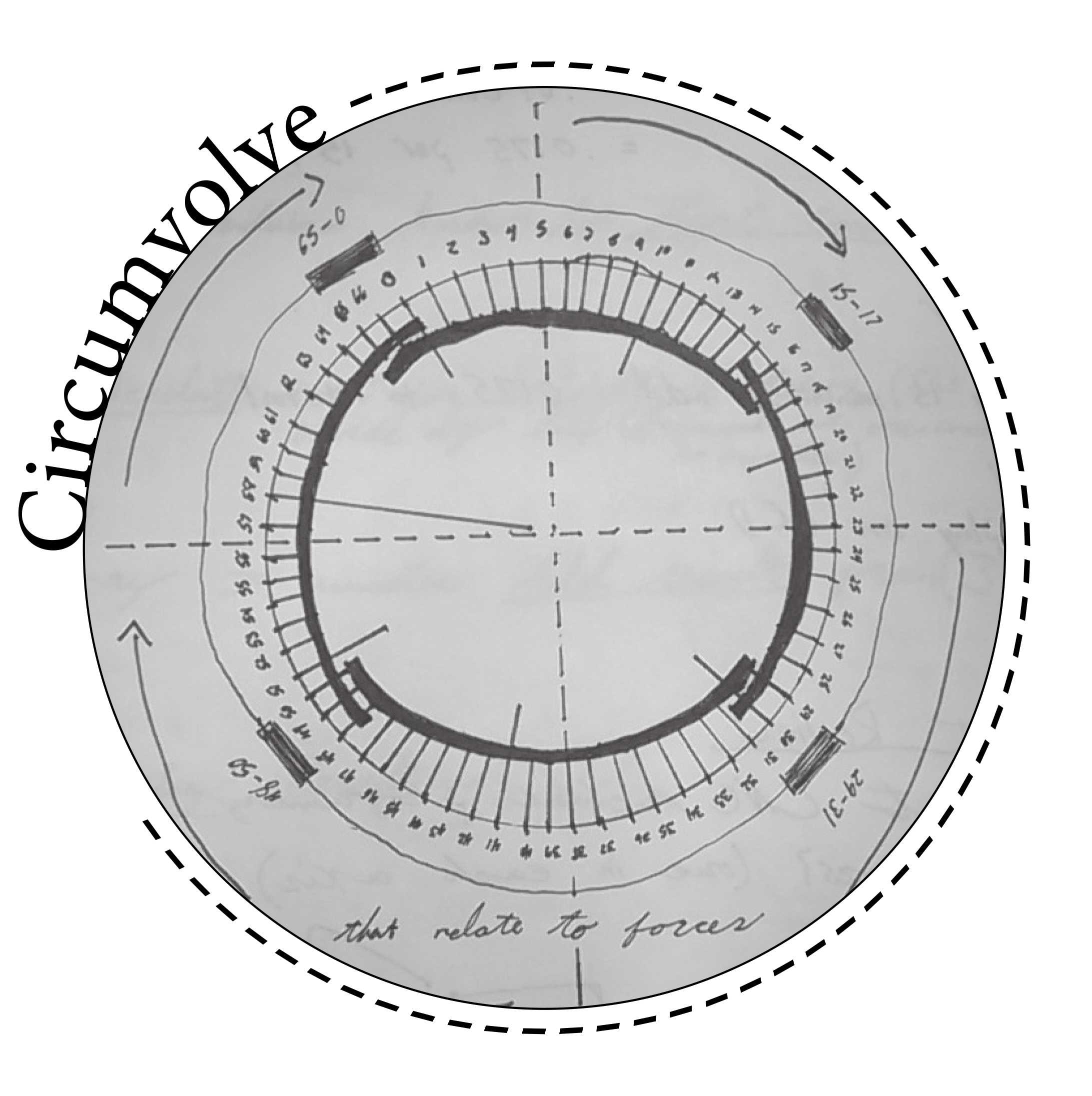
Circumvolve was the name for my studio project this semester. The basic concept was that the oculas that was created would circumvolve in relation to star constellations.
Initial design of recreating the motion from my concept into a physical model consisted of using 4 stepper motors to control the forces on individual cables forming the space.
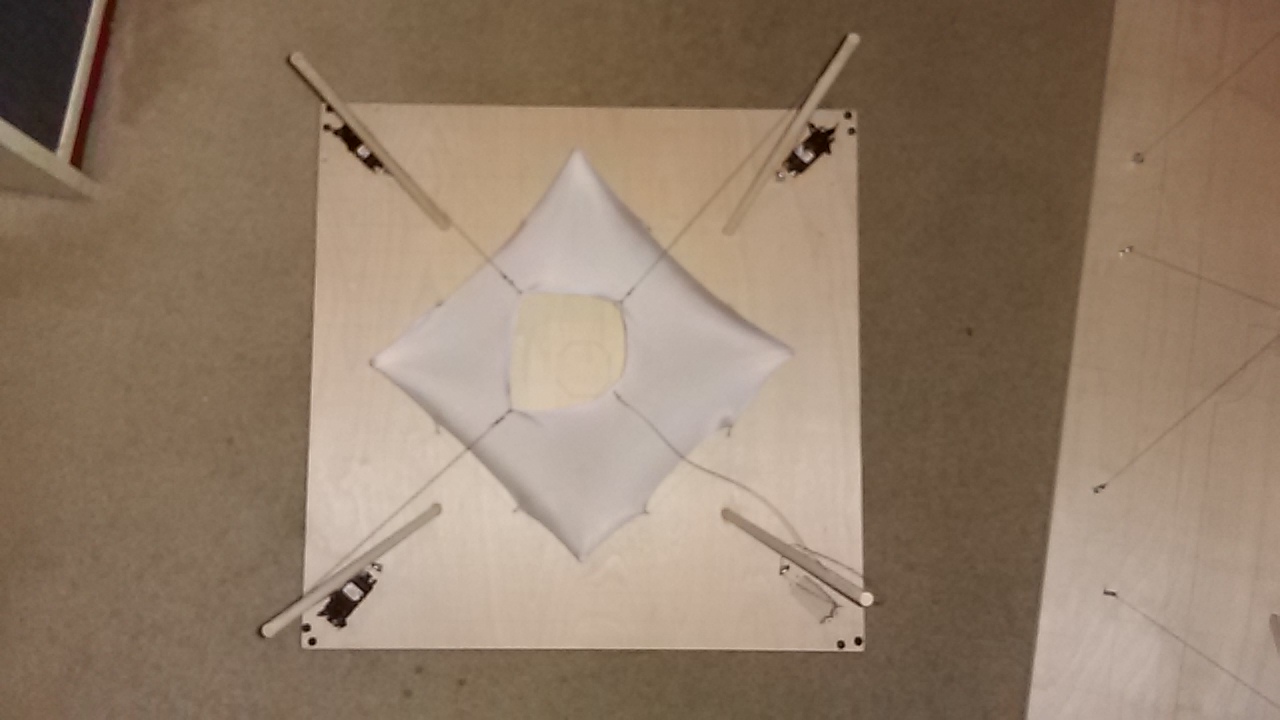
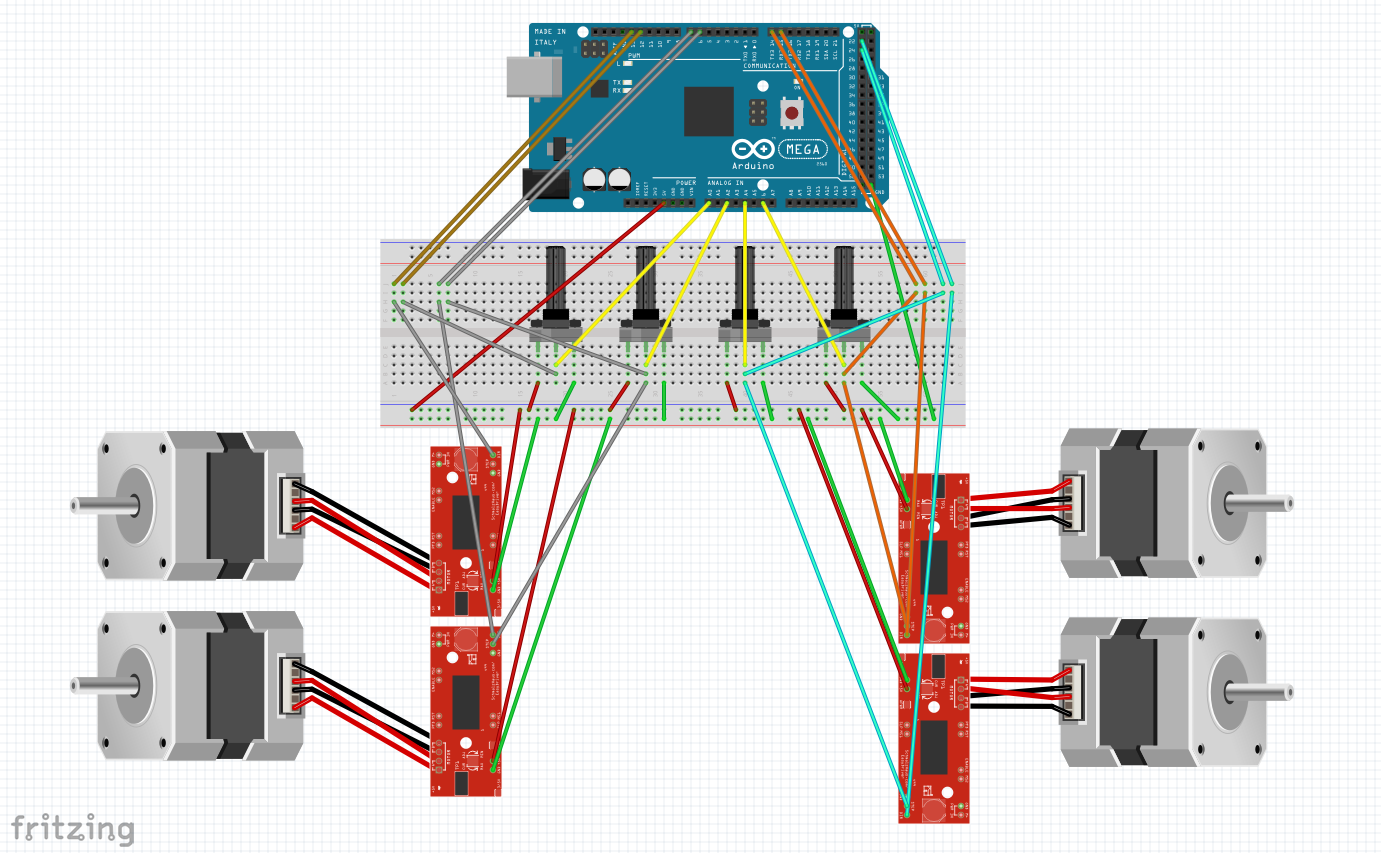
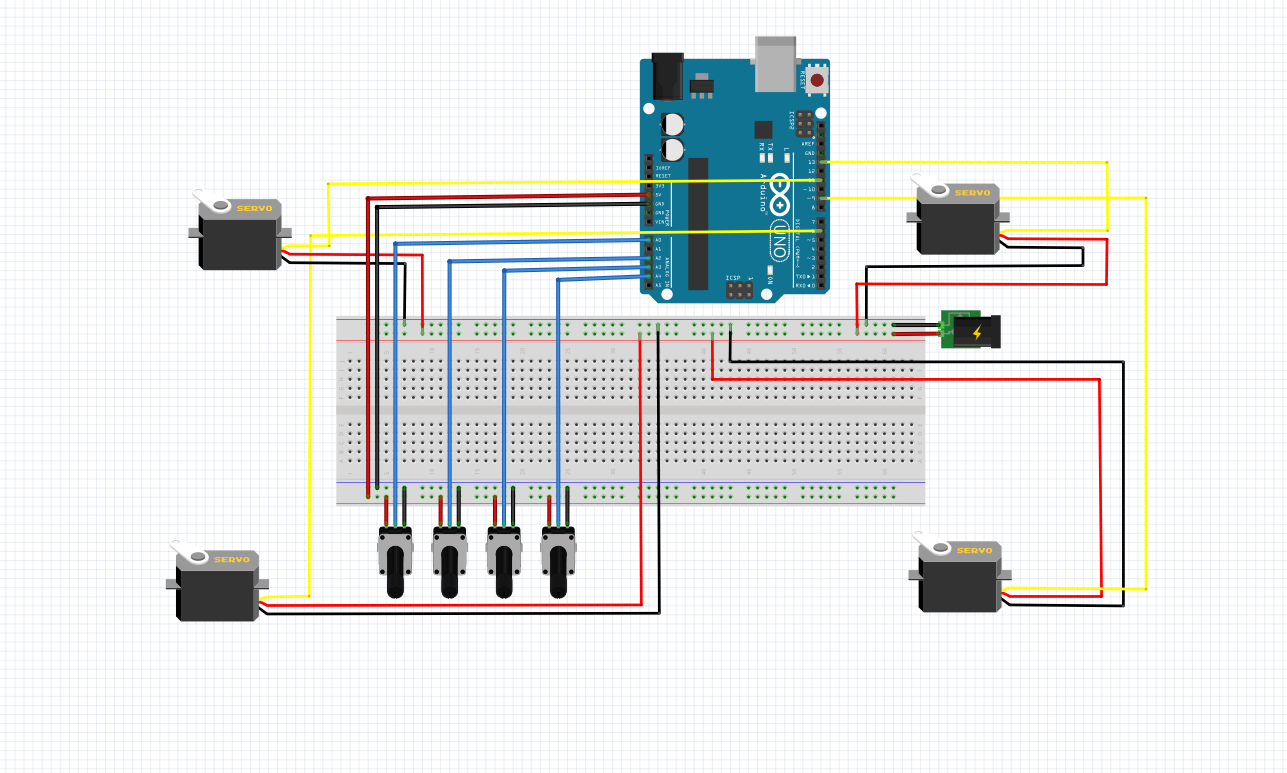
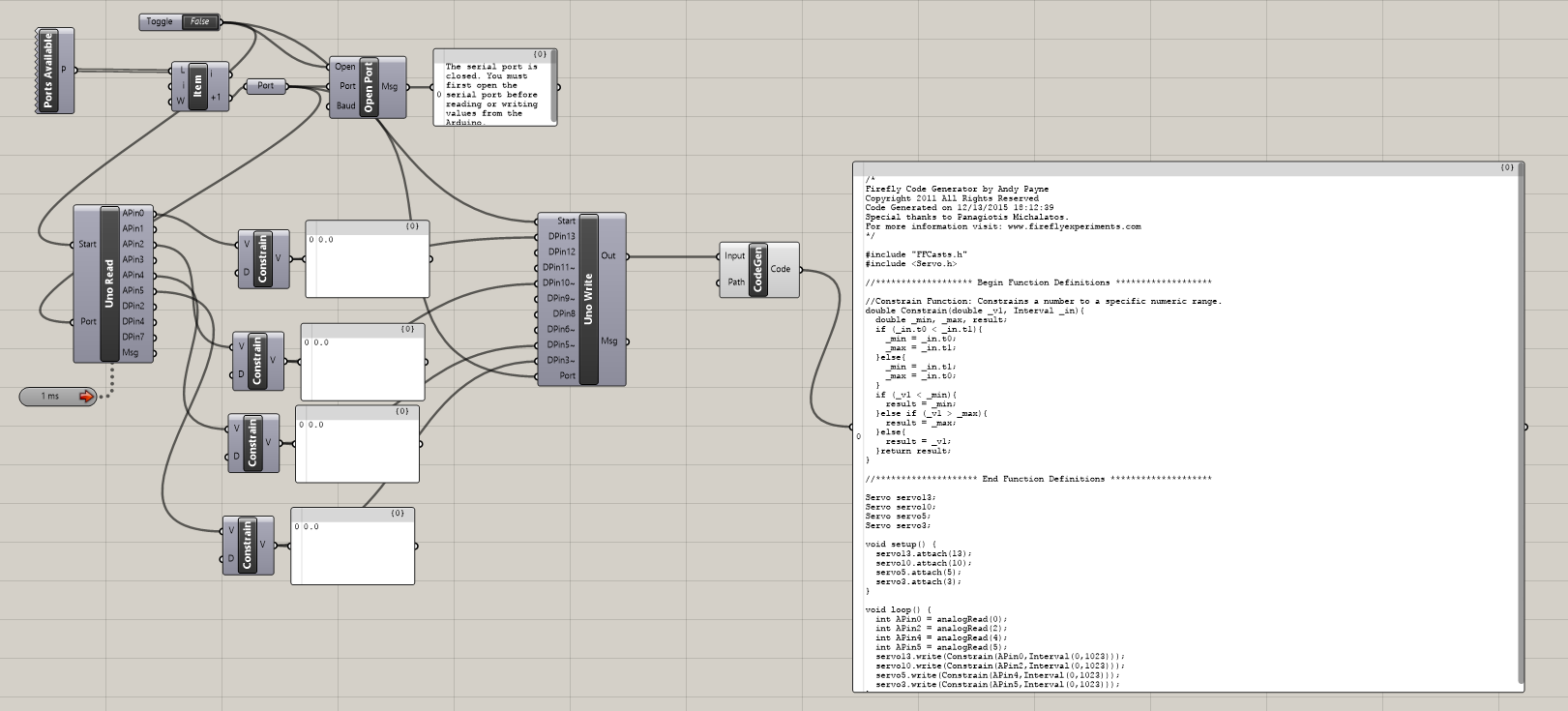
As I developed the concept, I realized that continuous rotation servos would serve my purpose as well as be easier to code. I substituted the 4 stepper motors for 4 continuous rotation servos. Using the Firefly plugin for grasshopper I was able to code the 4 servos to tighten the cables and move the oculas.
After finishing the 4 servo motor model, it did not work the way I wanted to. I realized that I could accomplish all that I wanted to using 4 servos with 1.
Concept rendering video for studio and final code project.
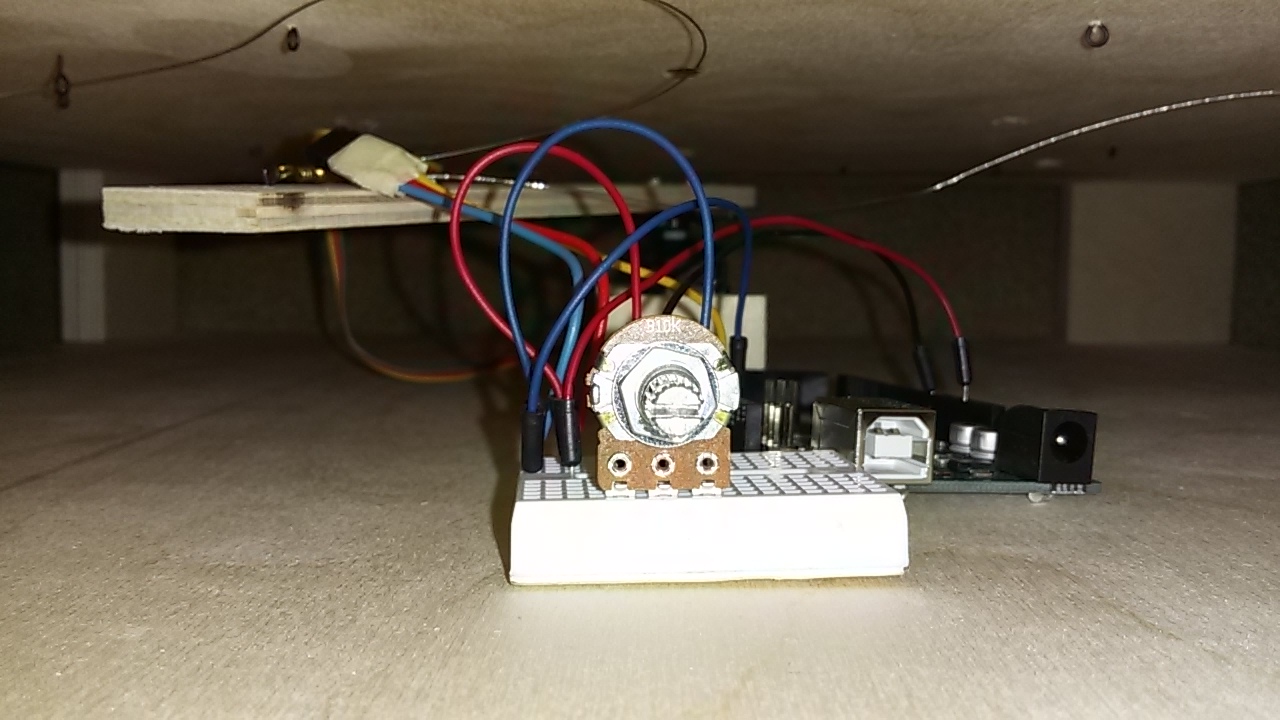
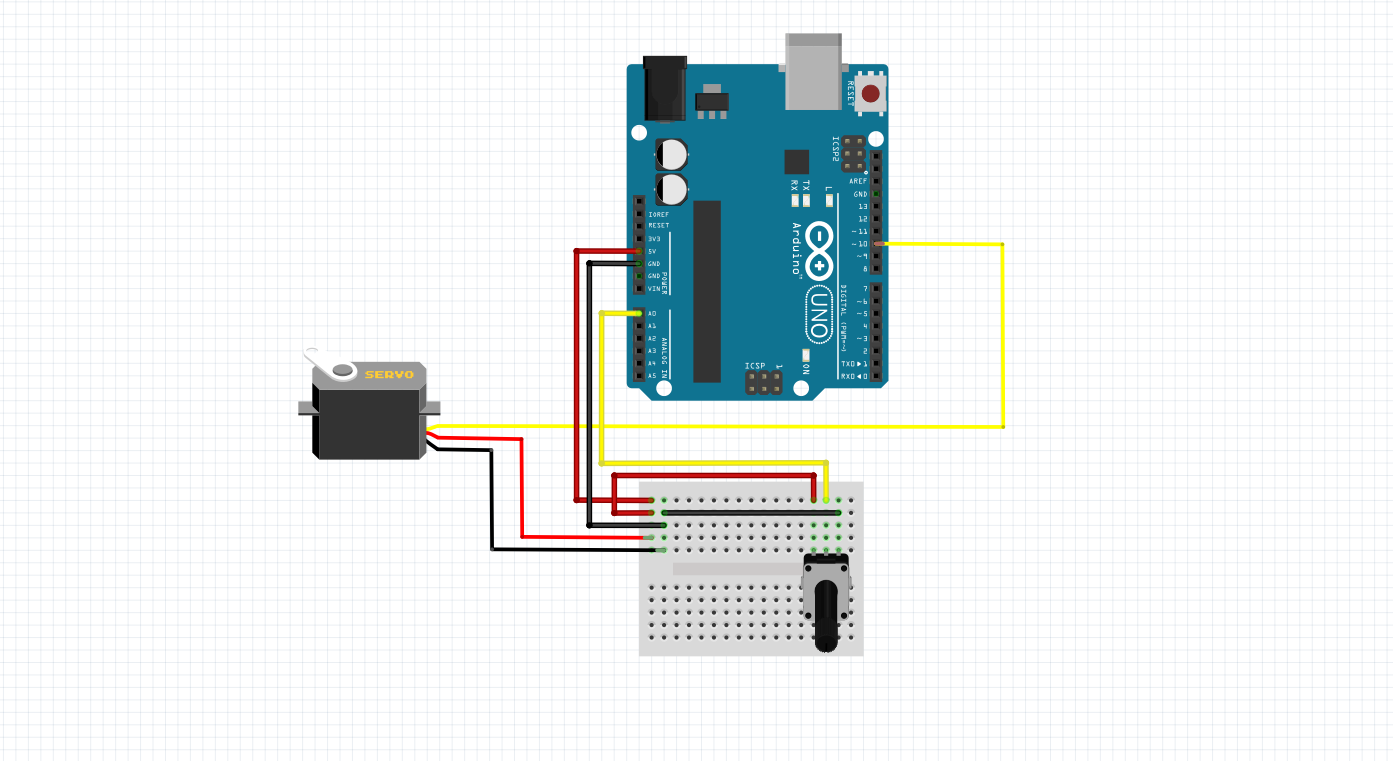
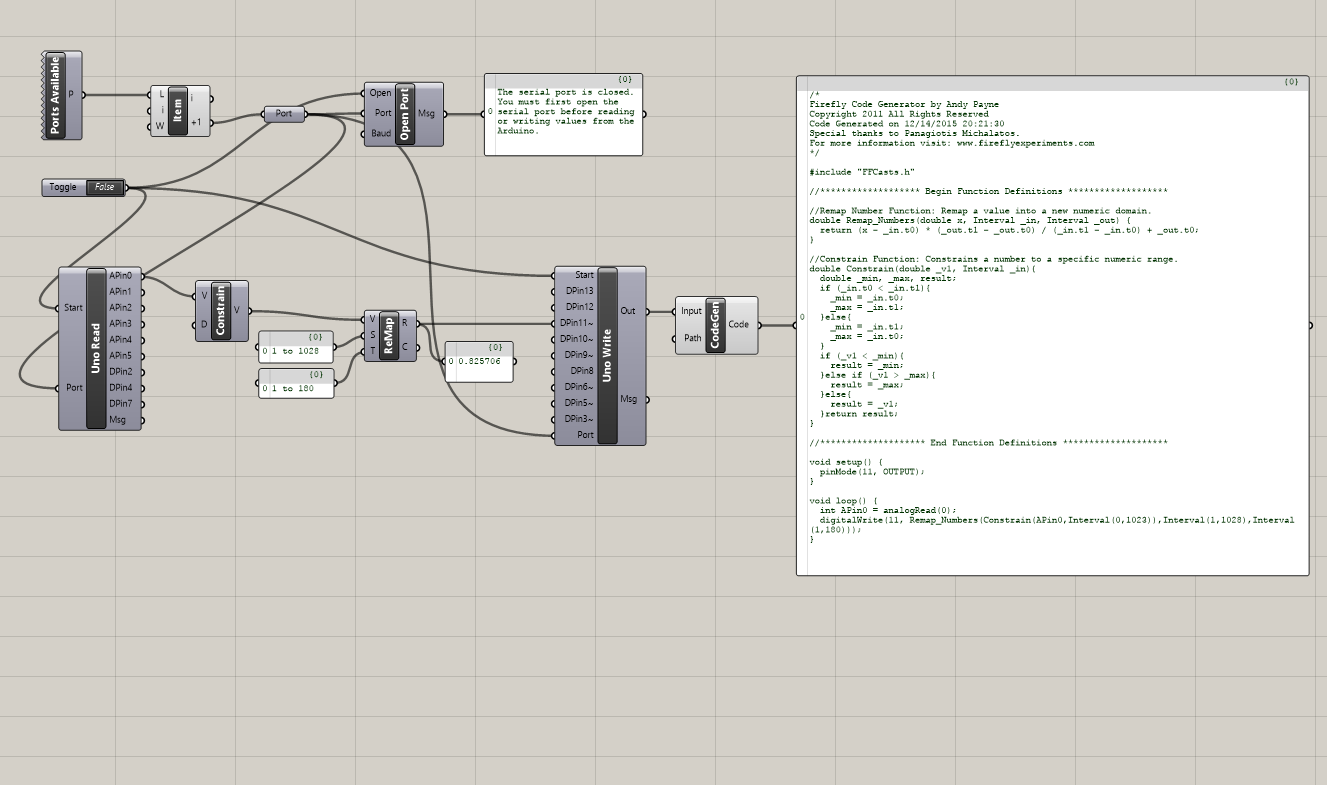
The Final design used a single servo with a extended arm. At the end of the arm I connected the cables so that as it rotated the cables would tighten thus forming the rotation of the oculas. The potentiometer is used as a switch to control the direction of the rotation arm.